日前,中心主任赵玉新教授指导博士生何永旭在《IEEE Transactions on Neural Networks and Learning Systems》(JCR Q1, IF= 14.255)上在线发表了题为:“ Adaptive Robust Control of Uncertain Euler–Lagrange Systems Using Gaussian Processes ”的重要文章。

IEEE神经网络与学习系统汇刊(IEEE Transactions on Neural Networks and Learning Systems)创办于1990年,属机器学习、信息科学、人工智能的交叉学科领域,是神经网络和学习系统方面的国际顶级期刊,连续多年被评为中科院顶级期刊。
该文章针对不确定欧拉-拉格朗日系统在时变外界干扰影响下的高精度轨迹跟踪控制问题,提出了一种具有自学习能力的自适应鲁棒控制框架。论文基于高斯过程回归方法,结合已知的动态系统先验模型和状态量测数据,得到了基于数据的非参不确定性模型以及不确定性的预测置信度。所提出的控制算法将不确定性预测信息与自适应滑模控制框架相结合,基于低反馈增益即可实现针对大范围不确定性的强鲁棒性。
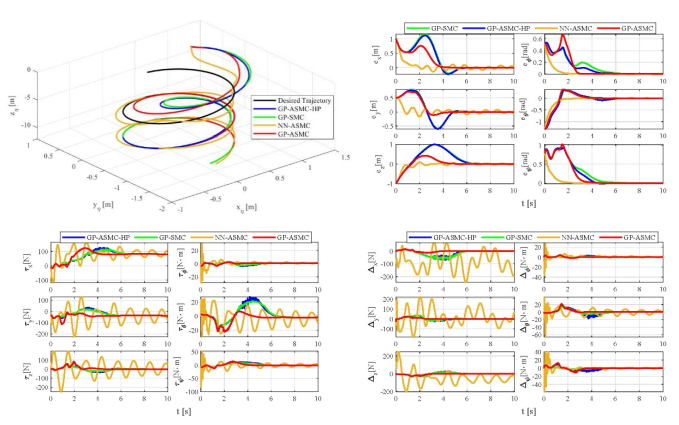
另外,该文章还首次提出了一种基于跟踪误差反馈的高斯过程超参数自适应律,能够同时提升跟踪控制与不确定性学习的性能。与现有基于似然的超参数优化方法相比,所提出的超参数自适应律能够在控制框架下实现数据高效且快速的不确定性学习。水下机器人跟踪控制仿真实验表明,所提出控制框架与超参数自适应方法能够明显提升跟踪控制与不确定性学习的性能和效率。
文章链接:
https://ieeexplore.ieee.org/document/9961103